自動駕駛大模型技術前沿 通信與自動控制技術的融合研究綜述
以Transformer為代表的大模型技術正深刻重塑自動駕駛(Autonomous Driving,AD)領域的研究范式。傳統(tǒng)基于規(guī)則或單一模塊化的自動駕駛系統(tǒng),在面對長尾場景、復雜交互和不確定性環(huán)境時,常顯乏力。而端到端自動駕駛大模型,通過海量多模態(tài)數據進行預訓練,展現出強大的場景理解、決策規(guī)劃和控制生成能力,為實現高階自動駕駛提供了新的路徑。本文旨在對自動駕駛大模型的關鍵技術進行調研,并重點剖析其在通信與自動控制層面的研究進展與挑戰(zhàn)。
一、 自動駕駛大模型的核心架構與范式演進
當前主流的自動駕駛大模型架構主要分為兩類:1)以感知-決策-控制為脈絡的模塊化大模型,即在感知、預測、規(guī)劃等關鍵模塊中分別引入大模型提升性能;2)端到端(End-to-End)大模型,將原始傳感器輸入(如攝像頭、激光雷達)直接映射為控制信號(如方向盤轉角、油門/剎車)。后者因其更符合數據驅動原則和潛在的更高性能上限,成為近期研究熱點。典型代表如Wayve的GAIA-1、特斯拉的FSD V12、毫末智行的DriveGPT等,它們通常基于視覺Transformer(ViT)或擴散模型(Diffusion Model)構建,能夠生成逼真的未來場景并據此做出規(guī)劃。
二、 通信技術在自動駕駛大模型中的關鍵角色
自動駕駛絕非單車智能的孤立問題,車與車(V2V)、車與路(V2I)、車與云(V2C)的協(xié)同通信是提升系統(tǒng)安全性、效率與智能水平的關鍵。在大模型時代,通信技術的研究重點發(fā)生了顯著轉變:
- 高帶寬、低時延的數據共享:大模型的訓練與協(xié)同推理依賴于海量、高質量、實時更新的多車多源數據。5G/5G-Advanced及未來的6G通信技術,為車輛間實時共享高維感知特征(如鳥瞰圖BEV特征)、軌跡預測結果乃至大模型中間層激活值提供了可能,從而實現“群體智能”與協(xié)同感知。
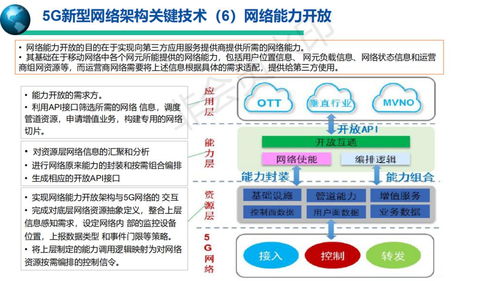
- 模型參數的高效分發(fā)與更新:中心云可利用全局數據持續(xù)訓練和優(yōu)化大模型,并通過無線網絡將更新后的模型參數或提示(Prompt)高效、安全地分發(fā)給邊緣車輛(聯(lián)邦學習范式)。這要求通信協(xié)議能支持大模型參數的稀疏化更新和差分隱私保護。
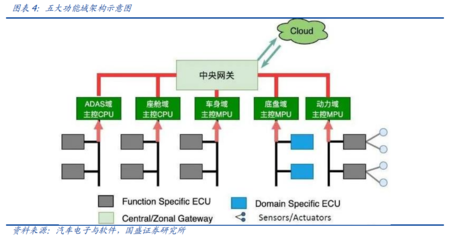
- 車路云一體化協(xié)同決策:路側智能單元(RSU)配備的大模型可以對復雜路口進行全局優(yōu)化調度,并通過通信鏈路將最優(yōu)通行策略實時下發(fā)至車輛端模型,指導其微觀行為。這構成了一個分層式的大模型決策系統(tǒng)。
三、 自動控制技術與大模型的深度融合
將大模型的輸出轉化為安全、平滑、舒適的車輛控制指令,是閉環(huán)中的最后且最關鍵一環(huán)。傳統(tǒng)控制方法(如PID、MPC)與學習型控制(如模仿學習、強化學習)正在與大模型深度結合:
- 大模型作為高級決策器:大模型負責輸出高層次的路徑點序列或行為語義(如“在下一個路口左轉”),而底層則由一個魯棒性強的傳統(tǒng)控制器(如模型預測控制MPC)負責軌跡跟蹤與穩(wěn)定控制。這種分層結構兼顧了智能與安全。
- 大模型直接生成控制信號:端到端大模型直接回歸方向盤、油門和剎車的連續(xù)值。其挑戰(zhàn)在于控制動作的平滑性、安全性以及對物理約束的滿足。當前研究通過引入基于物理的損失函數、將控制信號離散化為詞元(Token)融入語言模型、或利用擴散模型生成滿足多重約束的最優(yōu)控制序列來應對。
- 基于世界模型的強化學習控制:大模型可充當“世界模型”,預測自身動作在環(huán)境中的長期后果。智能體(控制器)在此世界模型中進行“想象”演練和策略優(yōu)化(如Dreamer算法),從而學習到更安全、高效的駕駛策略,并大幅提升數據利用效率。
四、 挑戰(zhàn)與未來展望
盡管前景廣闊,自動駕駛大模型在通信與控制層面仍面臨嚴峻挑戰(zhàn):
- 通信可靠性:在惡劣天氣、隧道、城市峽谷等復雜信道環(huán)境下,如何保證關鍵模型數據與指令的可靠、低時延傳輸,是V2X通信必須解決的工程難題。
- 安全與合規(guī)性:大模型的“黑箱”特性使其決策過程難以解釋,在發(fā)生事故時歸責困難。如何構建可驗證、符合交通法規(guī)且具備安全邊界的大模型控制策略,是邁向商用的前提。
- 計算與能效:大模型推理耗能巨大,對車載計算平臺構成壓力。如何設計輕量化模型架構,并結合邊緣計算與云計算進行任務協(xié)同分配,是工程落地的關鍵。
- 仿真與測試驗證:構建高保真、可擴展的仿真環(huán)境,用于大規(guī)模測試和評估大模型在極端場景下的性能與安全性,已成為不可或缺的研發(fā)環(huán)節(jié)。
自動駕駛大模型將朝著多模態(tài)理解更精準、決策邏輯更可解釋、車路云協(xié)同更緊密的方向發(fā)展。通信技術將不僅承擔數據傳輸管道職能,更將演變?yōu)榉植际缴窠浘W絡的一部分;而自動控制則將更深地融入學習框架,形成從感知到執(zhí)行的統(tǒng)一、智能、安全的“神經控制器”。這一融合進程,將持續(xù)推動自動駕駛技術邁向真正的L4/L5級無人化。
如若轉載,請注明出處:http://m.shanghaibaiyi.cn/product/51.html
更新時間:2026-04-15 16:47:19